
Navigation Stack
Seamlessly integrates into your ROS architecture and provides full range of adjustments, while keeping an out-of-the-box simplicity
• Smart obstacle management
The system learns and updates the obstacle layout, adapting to environmental changes ↓
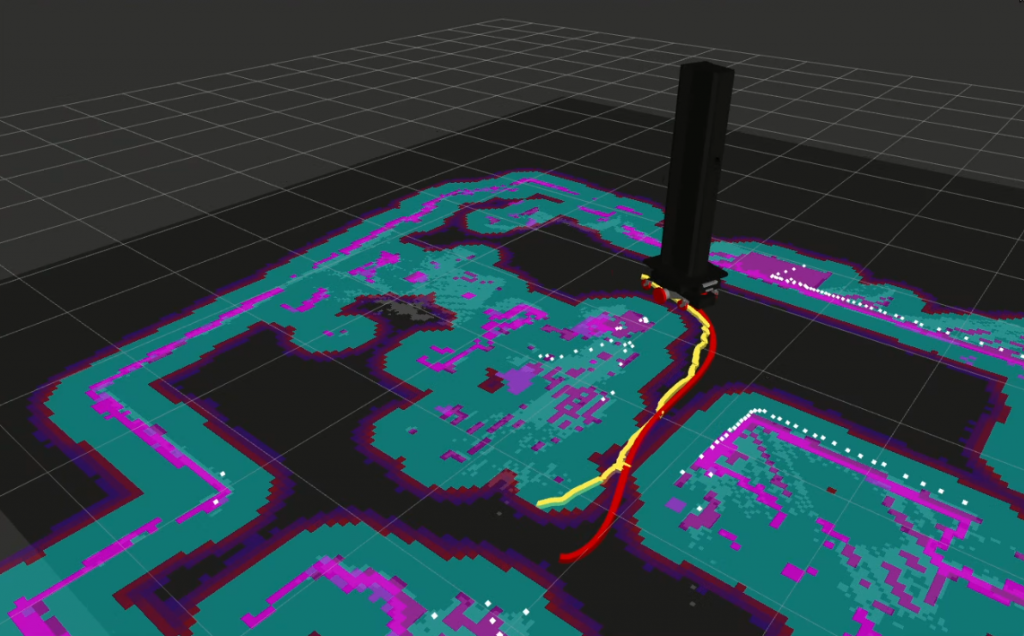
• Smooth and fast trajectory planning
State-of-the-art algorithms (see our publication page) to ensure safe, accurate and smooth navigation in cluttered environments ↓
• Predictive safety features
An extra security layer to react to sudden environmental changes ↓
Safely memorize new static obstacles and filter out dynamic ones
- Our algorithms differentiate static obstacles from dynamic ones by analyzing the pattern of their appearances in the robot’s sensory inputs.
- Smart memorization of new static obstacles reduces the need to look for detours, while not overloading the map, thereby preventing the robot from becoming blocked.
- Effective filtering of dynamic obstacles helps to avoid excessive re-planning and allows for smooth motion in cluttered and populated environments.
Smooth and fast trajectory planning
Our local planner calculates smooth and time-efficient trajectories at a high update frequency.
- Rapid, continuous computation of the trajectory ensures immediate and seamless responses to environmental changes.
- We compute smooth, differentiable control inputs that adhere to the robot’s kinematic constraints, ensuring safe and consistent motion.
- We have presented our approach at a peer-reviewed international conference (see our paper).
Multi-level safety control, adaptive to the rate of changes in the surroundings
- Future configurations are constantly modeled in advance to predict possible collisions and re-plan without pausing the motion;
- When re-planning without a pause in motion is not possible, smooth braking and restart procedures are used;
- Our planner uses direct inputs from the sensors to detect oncoming collisions, minimizing the overhead of the reaction.
Re-planning without pausing the motion
Emergency braking in case of abrupt obstacle appearance
Let’s get in touch
Describe us your robotics-related problem and let us start working on it together